Measuring the Wind Using Drones
How rotary-wind drones can be used to measure the wind in places that are hard to reach with other methods

There are a lot of reasons to measure the speed and direction of the wind. The airflow that we encounter in nature is usually turbulent and unpredictable. On a larger scale, we can predict the wind, but everything becomes more complicated with finer resolutions. Temperature, humidity, and interactions with the surface, are impacting the airflow and have to be modeled accordingly if you want to predict the wind with precision. Large Eddy Simulations (LES) allow us to model the wind for small volumes. This method requires detailed knowledge of the modeled environment and a lot of computational power, however.
{kind=link}
Anemometers
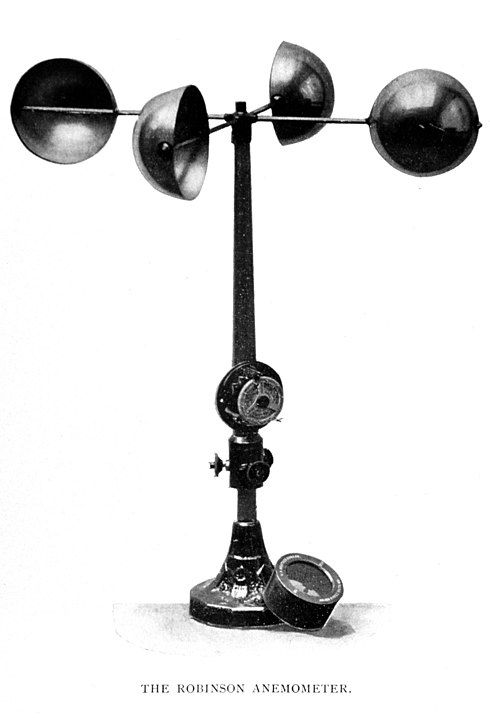
This approach is not just limited but can still be inaccurate because of unknowns in the environment. Because of this, you'd want to double-check such a model with real-world data, which brings us back to the topic of wind measurements. Probably the most common way of measuring the wind is to use a stationary anemometer. If you are only interested in the horizontal wind speed, you could use a cup anemometer. With a vane-anemometer, you can additionaly measure the horizontal direction of the wind.

{kind=link}
{kind=link}
A more sophisticated approach to measuring the wind is the observation of the Doppler effect as the result of air movement. Ultrasonic anemometers use multiple microphones to measure the distortion of sound waves caused by the wind. With enough microphones, you can measure wind speed and direction in 3 dimensions. Finally, you can also use a LIDAR to measure the wind at a specific point in 3D space. For this, a laser beam is focused at a specific point in the line of sight of a ground station. The air particles at that specific point will reflect the laser to the ground station. This reflected light is distorted by the Doppler effect caused by the moving air particles and can, therefore, be used to measure the airflow.

_-_DSC06371.JPG){kind=link}
All these methods require a ground station and/or are expensive. If you want to measure the wind in inaccessible places without spending a lot of money, you have to get more creative.
Using Drone-Mounted Anemometers
This is, where rotary-wing drones can offer an alternative solution. Rotary-wing means, that the wing that provides the lift isn't fixed but constantly rotating (aka. the propeller). Because of this, the drone is not required to move through the air to be able to fly and can hover in the desired measurement position. Drones that measure the wind can do so using a direct or indirect approach. The direct method uses anemometers that are strapped on the vehicle. Indirect methods, on the other hand, measure how the wind influences the drone and derive the measurements from that. Conceptually, direct methods are easier to understand. Just put an anemometer on a drone, let it hover at the desired location, and record measurements, right?
Well... there are a few things to consider here. First of all, you have to take the airflow of the drone propellers into account. The closer the anemometer is placed to the propellers, the more distorted the measurements will be. This means, that you have to move the sensor either horizontally or vertically away from the downwash of the propellers and make sure to model any left-over interferences appropriately.
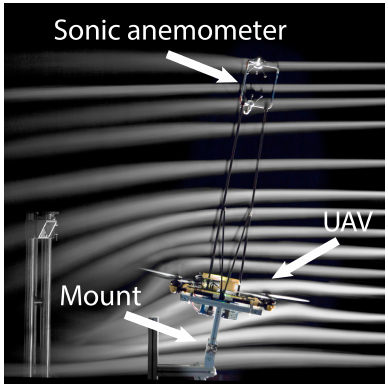
This is also a good point, to talk about the frame of reference, that needs to be applied to every measurement. Drones aren't perfectly stable and have to do small correctional movements to stay at their desired location. A small tilt, roll, or yaw maneuver can result in unwanted airflow measurements since the anemometer is mounted far away from the center of rotation. Additionally, the amount of propeller interference is dependent on the actual wind speed. As can be seen in the wind tunnel experiment above, the disturbances caused by propeller-downwash are less problematic if horizontal wind speeds are high, but will become noticeable in any other case.
The Indirect Method
Directly measuring the wind using drone-mounted anemometers requires expensive sensors and an elaborate error model to account for all the disturbances caused by propeller downwash and drone movements. Mounting the sensors far enough away from the propeller-induced turbulence increases the weight and size of the vehicle and, therefore, reduces the overall flight time and stability.
An arguably more elegant solution is the indirect method. Instead of mounting an anemometer on the drone, you could just use the already existing sensors. Every drone has to counteract external wind disturbances to be able to hover on the spot. This is usually done by fusing GPS- and IMU data to determine the positional and orientational changes and counteract them. This data can also be used to determine the wind speed and direction. It requires a basic understanding of how the wind influences the vehicle and how the controller outputs counteract these influences. The easiest way to think about this problem is by using the wind triangle.
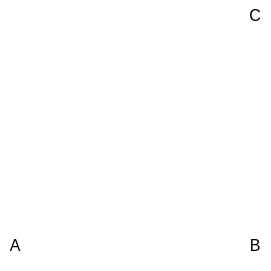
The Ground-Vector \(\overline{AB}\) represents the actual movement of the vehicle with respect to the ground. As mentioned above, this vector can be determined by using GPS data. The air vector \(\overline{AC}\) can be inferred by observing the current vehicle state (accelerations, orientation, and control outputs) and by modeling how the vehicle would behave without any external wind influences. The difference between these two is the wind vector \(\overline{CB}\), which describes the drift, that is induced by the wind. Modeling the aerodynamic properties of the vehicle is the last step in calculating the actual wind speed. You can use those properties to calculate the wind forces that caused the drift, represented by the Wind-Vector. These forces can then be used to determine the actual airflow.
Real Examples
In the table below, you can see a view of the indirect approach implementations.
| Source | Flight Model | Evaluation | Test Scenario | Hardware |
|---|---|---|---|---|
| Neumann and Bartholmai, 2015 | Physical | 1xUA | Hover, Horizontal | AirRobot AR100-B |
| Demitrit et al., 2017 | Physical | 1xCA + 1xVA | Hover, Drift | Wingtra One |
| Palomaki et al., 2017 | Physical | 3xUA | Hover | Quanum Nova |
| González-Rocha et al., 2020 | System Id (Linear Regression) | 1xUA + 2xSoDAR | Hover, Vertical | 3DR Solo |
| Allison et al., 2020 | LSTM | Dryden, LES | Hover, Horizontal | Simulation |
| Simma et al., 2020 | Physical | 1xUA | Hover | IRIS+ Quadrotor |
I categorized the models, that are used to estimate the flight vector like this:
- Physical: classic physical model with forces, momentum, and resistances
- System id: system identification methods (linear regression in this case)
- LSTM: Long short-term memory network as an estimator
To evaluate these implementations, the drones were exposed to various wind conditions, and one or more stationary anemometers were usually placed in close proximity for comparison. I also listed the following types of anemometers in the table:
- UA: Ultrasonic Anemometer
- CA: Cup Anemometer
- VA: Vane Anemometer
- SoDAR: Sonic Detecting And Ranging
- Dryden, LES: Dryden and LES Simulation instead of real-world measurements
The drones were operated in different modes of flight while measuring the wind:
- Hover: Hovering in one place
- Horizontal: Flying with constant speed along a linear horizontal trajectory
- Drift: Drifting with the wind (Hovering if there is no wind)
- Vertical: Flying with constant speed along a linear vertical trajectory
Conclusion
After researching this topic for a while, I couldn't find any real comparison between direct and indirect methods. Evaluations that can be found in the literature are using a variety of experimental set-ups. As you can see above, the kind of wind conditions and stationary anemometer configurations differ from paper to paper. This variance makes any true comparison impossible. I could only find one campaign that compared various drones in a controlled environment: Barbieri et al. compared multiple drones, that were taking atmospheric measurements on the same day in the same location with the same stationary sensors for evaluation. There weren't enough wind measurement examples in this campaign, to draw any valuable conclusions, however.
Aside from reaching inaccessible spaces and saving money on equipment, I also found another interesting use case for drone measurements mentioned by (Robinson et al., 2020). In scenarios, where entire fleets of drones are sharing the same airspace, it might make sense to use indirect wind measurements to improve the overall performance and safety of that fleet. A delivery drone, for example, could constantly measure the wind during the delivery and report back locations with high wind speeds. Other drones of this fleet could then avoid the reported locations and plan safer and more efficient trajectories.